Wenn man sich einen Drucker selber aufbaut, dann nimmt man einfach eine Firmware (aktuell wäre Marlin oder Repetier) und spielt die dann auf den Drucker. Man ist erst Mal froh, wenn sich die Achsen bewegen und kümmert sich wenig um die Aufheizzeiten.
Vielfach sind aber die falschen PID-Werte in der Firmware eingetragen, weil man einen Extruder oder ein Heizbett verwendet, das halt nicht dem entspricht, was man nun im Drucker verbaut hat.
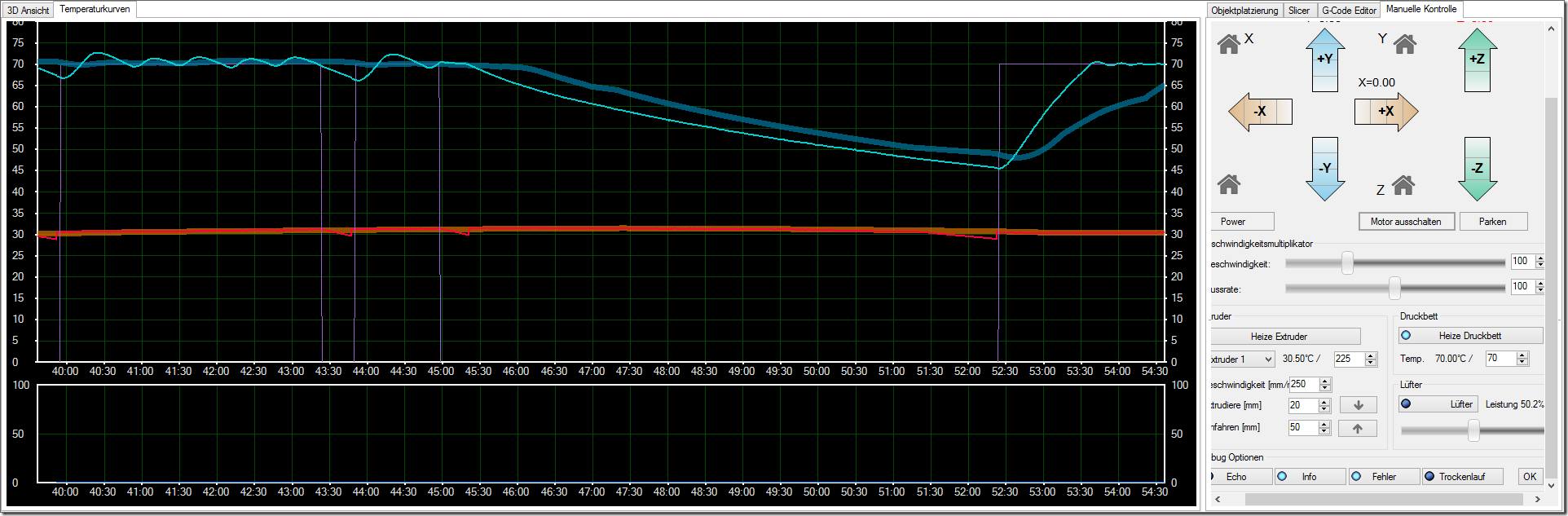
PID-Werte sind Werte, die die Regelung steuern, welche die Heizungen an eurem Drucker steuern. Was für einen Einfluss diese Werte haben können, seht ihr im Titelbild. Links ist die Heizkurve ohne richtige PID-Werte, rechts die Heizkurve mit den richtigen PID-Werten
Um die korrekten Werte für den Extruder zu ermitteln gebt ihr in der Befehlszeile eures Hostprogramms folgende Zeile ein:
M303 E-0 S230 C8
M303 startet den Befehl
E-0 wählt den Extruder 1
S230 setzt die zu erreichende Temperatur auf 230°C
C8 setzt die Zyklen auf 8
Nun beginnt euer Drucker aufzuheizen, nachdem er 8 mal die 230°C erreicht hat, gibt er in der Befehlszeile untereinander die PID-Werte aus, das könnte wie folgt aussehen:
Kp 21.08
Ki 1.09
Kd 101.56
Diese könnt ihr nun direkt in eure Firmware an der entsprechenden Stelle eintragen. Falls ihr die sofort in den EPROM übertragen möchtet, dann könnt ihr die nun mit den folgenden Befehlen direkt übertragen:
M301 P21.08 I1.09 D101.56
M500
Wenn ihr nun das ganze auch noch für das Heizbett machen wollt, braucht ihr die folgenden Befehle:
M303 E-1 S60 C8 //Ausführen vom Autotuning für das Heizbett auf 60°C
M304 P559.41 I104.10 D751.57 //Schreiben der PID-Werte in den Zwischenspeicher
M500 // Speichern der Werte auf dem Arduino
Falls ihr die PID-Regelung für das Heizbett verwenden wollt, müsst ihr diese, zumindest bei Marlin, noch in der Firmware aktivieren.
 Ben hat das mechanische Handwerk von der Pieke auf in der Werkstatt erlernt und anschliessend als technischer Kaufmann. Danach arbeitete er ein paar Jahre als Datenbank-Programmierer.
Dann absolvierte er ein Studium als Maschinenbautechniker.
Und nun hat ein paar CAS Weiterbildungen im Bereich Data Science absolviert
Heute entwickelt er Sondermaschinen für ein Sondermaschinenbau Unternehmen in der Schweiz.
2014 gründete er das FabLab Winterthur in der Schweiz.
Seine Hobbies sind seine Freundin, neue Dinge zu erfinden, neue Gadgets zu testen, das FabLab Winti, 3d-Drucken, geocachen, Unihockey spielen, ab und zu fotografieren (www.belichtet.ch) und Mountain Biken.
Ben hat das mechanische Handwerk von der Pieke auf in der Werkstatt erlernt und anschliessend als technischer Kaufmann. Danach arbeitete er ein paar Jahre als Datenbank-Programmierer.
Dann absolvierte er ein Studium als Maschinenbautechniker.
Und nun hat ein paar CAS Weiterbildungen im Bereich Data Science absolviert
Heute entwickelt er Sondermaschinen für ein Sondermaschinenbau Unternehmen in der Schweiz.
2014 gründete er das FabLab Winterthur in der Schweiz.
Seine Hobbies sind seine Freundin, neue Dinge zu erfinden, neue Gadgets zu testen, das FabLab Winti, 3d-Drucken, geocachen, Unihockey spielen, ab und zu fotografieren (www.belichtet.ch) und Mountain Biken.
Pingback:Eine Ultimaker1 Düse am Ultimaker2 | wp.3drucken.ch
In Repetier Firmware (0.92 getestet) muss der PID Autotune Befehl wie folgt aussehen: M303 P1 S60
Danke für den guten Artikel 🙂